|
|
Übersicht:
Funktion 4- und 8-fach Enkoder
Aufbauhinweise 4- und 8-fach Enkoder
Sonstiges 4- und 8-fach Enkoder
Stromfühlerenkoder
Download
Funktion:
Bevor ich auf die Funktion des Enkoders eingehe, hier erst einmal ein Foto/Layouts. Abgebildet sind der 8fach und 24fach Enkoder.
PM_ENC8


PM_ENC24


Nun noch eine Übersicht der im weiteren Text erläuterten Punkte:
Der Enkoder dient zur Rückmeldung von Schaltzuständen. Diese Schaltzustände können durch ein Ereignis des fahrenden Zuges (Zug überfährt
Kontaktmelder) oder aber auch durch das Betätigen eines Tasters oder Schalters ausgelöst werden (Stichwort Gleiksbildstellpult). Gerade
letzteres ist eine Interessante Variante, um z.B. Einfluss auf Betriebsabläufe zu nehmen.
An den Enkoder können Schaltelemente angeschlossen werden, die nach Masse hin schalten. So z.B. die in der Abbildung gezeigten Elemente.

Aufbauhinweise:
Aufgebaut habe ich derzeit einen 8fach und einen 24fach Enkoder. Der 8fach Enkoder verwendet als Microkontroller einen ATTiny2313,
der 24fach Enkoder einen ATMega162. Der 24fach Enkoder wird über 3 aufeinanderfolgende Adressen angesprochen. Es braucht
aber lediglich seine Startadresse definiert zu werden.
Die R-C-Kombination am Eingang jedes Rückmeldekontaktes bildet einen Tiefpass 1. Ordnung. Damit werden Frequenzen bis ca 340Hz
weitergeleitet. Höhere Frequenzen werden unterdrückt.
Sonstiges:
- Enkoderadresse:
- Die Enkoderadresse wird wie bei allen Modulen im EEPROM des uCs abgelegt. Die Zählweise beginnt bei 0. Durch die Unterstützung der
MoBaSbS durch TrainControllerTM mit einem eigenen Treiber, kann der volle Adressumfang der Enkoder im Bereich von 0 bis
255 ausgenutzt werden.
- Entprellzeit:
- Für jeden Eingang getrennt, läßt sich eine Zeit zwischen 10ms und 2,5sec definieren, über die ein aufgetretenes Ereignis gehalten
wird, auch wenn bereits wieder der Eingang inaktiv geworden ist. Außerdem wird der Zeitgeber mit jedem aktiven Ereignis neu gestartet.
Mit dieser Option wird schon im Enkoder verhindert, daß eine Vielzahl von Ereignissen an den PMC und von dort weiter über den IFC an
den PC geleitet werden, die lediglich durch z.B. einen schlechten Rad-Schiene-Kontakt hervorgerufen werden. Die nachstehende Grafik
veranschaulicht nochmals die Funktion:

- Rückmeldung (1)
- Wie man dem Bild entnehmen kann, fragt der PMC den Zustand des PMs in zyklischen Abständen (symbolisiert ducrh die Pfeile) ab.
Da vor dem ersten Rückmeldeereignis offensichtlich ein inaktiver Zustand anlag, wird bei der ersten Abfrage des PMCs eine '1' an
diesen zurückgemeldet. Obwohl der aktive Zustand am Eingang des PMs bei der zweiten Abfrage durch den PMC nicht mehr anliegt, wird
durch den Timer verhindert, daß der inaktive Zustand weitergeleitet wird. Da zwischen der 2ten und 3ten Abfrage erneut ein aktiver
Zustand am Eingang des Enkoders aufgetreten ist, wurde der Timer zurückgesetzt. Damit erfolgt weder bei der dritten, noch bei der
vierten Abfrage eine Meldung über eine Zustandsänderung. Erst zur letzten Abfrage - hier ist der Zähler nun komplett abgelaufen -
erfolgt die Rückmeldung des inaktiven Zustands.
Ein besonderer Fall wird im nächsten Bild behandelt. Die Zeit bis zum Senden eines inaktiven Zustands ist hier extrem kurz eingestellt.
Alternativ kann man sich auch ein Scenario mit sehr vielen Enkodern an einem PMC vorstellen, so dass der einzelne Enkoder in größeren
zeitlichen Abständen abgefragt wird. Es kann sich dann folgendes Scenario ergeben:

- Rückmeldung (2)
- Bei der ersten Abfrage durch den PMC wird eine '1' zurückgemeldet. Bei der zweiten Abfrage ist der Zähler bereits abgelaufen und
deshalb wird nun eine '0' weitergegeben. Bis hierhin entspricht der Ablauf dem schon Gezeigten der ersten Darstellung. Nun tritt aber ein
kurzer Impuls zwischen der zweiten und dritten Abfrage auf. Er ist gerade lang genug, um erkannt zu werden. Obwohl der Zähler bis zur
nächsten Abfrage bis auf 0 herunterlaufen könnte, wird er aber jetzt beim Stand von 1 festgehalten, da der Enkoder 'weiß', daß er noch
einen '1' Zustand melden muß! Genau der wird nun auch bei der dritten Abfrage gemeldet und erst jetzt kann der Zähler bis auf 0
zurückgehen. Dies führt dann in der vierten Abfrage zu der Zustandsmeldung '0'. Bei der fünften Abfrage liegt keine Änderung vor und so
wird nichts gemeldet.
Anhand dieses Beispiels wird deutlich, daß auch ein nur sehr kurzes aufgetretenes Ereigniss unter allen Umständen weitergegeben wird!
- Spannungsversorgung der Verbraucher (im Falle von z.B. Hallsensoren oder
Lichtschranken):
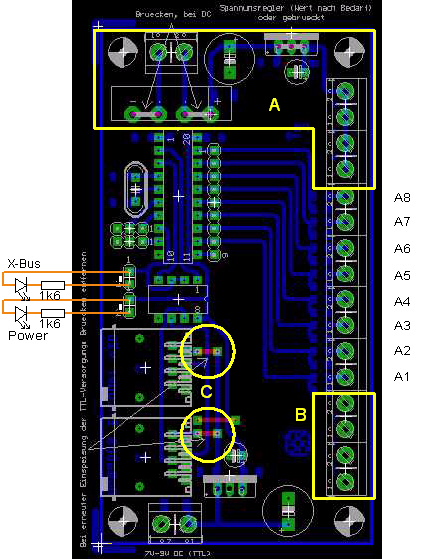
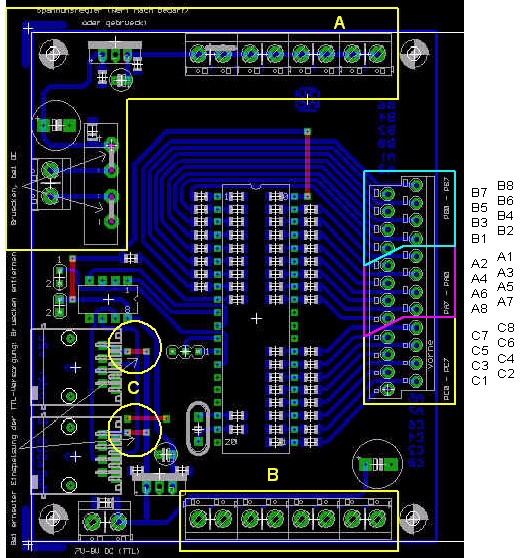
- Wie auf allen anderen Peripheriemodulen auch, kann die Spannungsversorgung als DC oder AC Versorgung erfolgen. Wird eine
DC-Versorgung gewählt, so kann der Gleichrichter an den gekennzeichneten Stellen (innerhalb der mit A bezeichneten gelben Markierungen)
gebrückt werden. Es wird eine AC-Spannung von ca. 9V oder eine DC-Spannung von 12V empfohlen. Gleichrichter, Festspannungsregler und
Kondensatoren können entfallen, wenn keine zusätzliche Spannung benötigt wird. Alle Bauteile in den gelben Markierungen A und B
brauchen dann nicht bestueckt zu werden.
- Spannungsversorgung des uCs:
- Prinzipiell wird der uC über das Datenkabel mit Spannung versorgt. Diese liegt bei ca. 9V-12V DC und wird auf jeder der Platinen
auf 5V stabilisiert. Bei sehr vielen Peripheriemodulen oder sehr langen Verbindungskabeln, kann der Spannungsabfall über die
Versorgungsleitung zu gross werden. In diesem Fall kann eine DC-Spannung von 9V-12V auf jedem Peripheriemodul neu zugeführt werden.
Achtung! Wird nicht die selbe Versorgungsquelle, wie für die anderen P-Module am selben Verwalter verwendet, muss eine der kurzen
Drahtbrücken (siehe Hinweispfeile im oben abgebildeten Layout - bei Buchstabe C) an der RJ45-Buchse entfernt werden, an der das
Datenkabel vom vorherigen Modul ankommt. Über die andere Drahtbrücke an der 2ten RJ45 Buchse wird dann die Versorgungsspannung 'frisch'
weitergegeben. Siehe auch den Hinweis zur Spannungsversorgung der Peripheriemodule an
anderer Stelle. Lässt man die Platinen als doppelseitige Platinen fertigen, so
muss die Leiterbahn auf der Oberseite der Platine entsprechend unterbrochen werden.
- Hinweise zur Inbetriebnahme:
- An den beiden 2poligen Pfostenleisten können zu Testzwecken LEDs aufgesteckt werden. Die obere LED dient zur Überprüfung des X-Bus
und muß während des korrekten Betriebs leuchten. Die untere LED zeigt lediglich an, ob die Spannungsversorgung korrekt anliegt. Ich
habe mir 2 Stecker mit LED und Vorwiderstand hergestellt, die ich verpolungssicher (die bei mir verwendeten Pfostenstecker haben eine
kleine Lasche - im Bild des 8fach Enkoders angedeutet) auf die Pfostenleiste stecken kann.
- Auf den aktuellen Enkodern und Dekodern sind noch weitere Pfostenleisten vorhanden. Diese werden aber
derzeit nicht benutzt und dienen lediglich eventuellen zukünftigen Erweiterungen.
Stromfühlerenkoder:
Zweileiterfahrer benötigen zur Besetztmeldung von Gleisabschnitten sogenannte Stromfühler. Die folgende Schaltung zeigt einen 8fach
Stromfühlerenkoder. Eigentlich ist der 8fach Stromfühler eine Kombination eines 8fach Enkoders, wie oben bechrieben, mit dazugehörigen
Stromfühlern auf einer Platine.
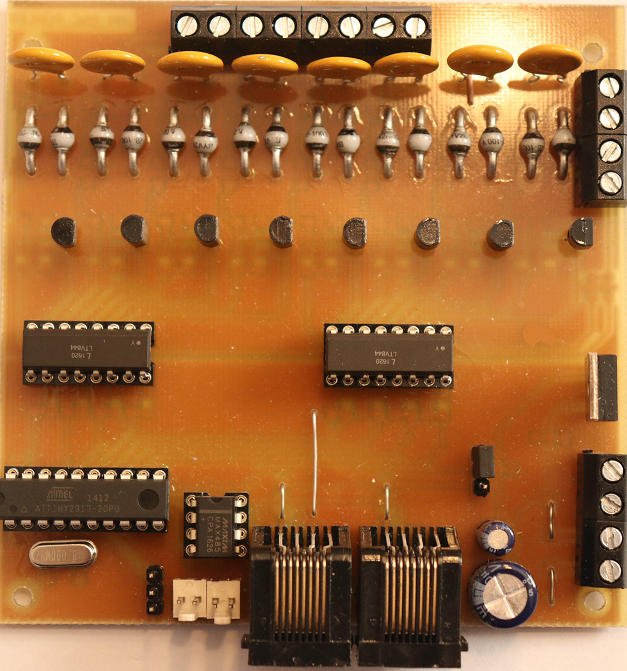
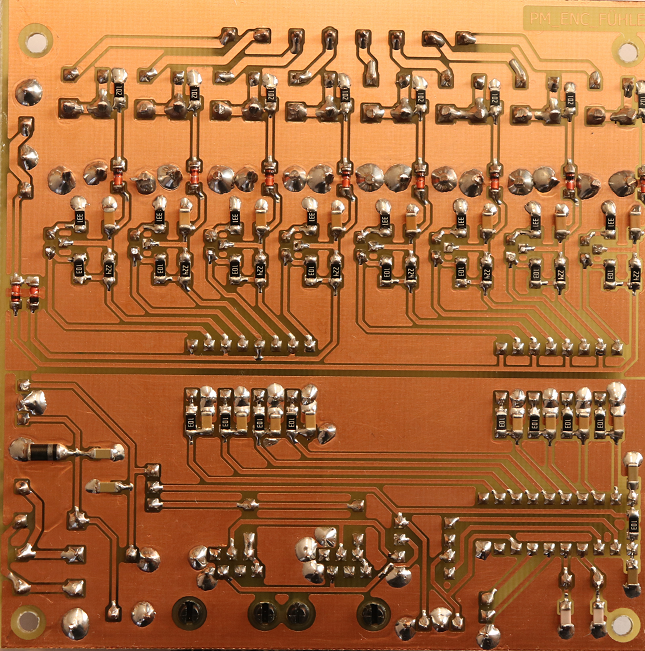
Zunächst zwei Bilder.
Stromfühlerenkoder von oben
Stromfühlerenkoder von unten
Die zu überwachenden Gleisabschnitte werden durch selbstrückstellende Sicherungen bei auftretenden Kurzschlüssen geschützt. Dieses bietet
neben der Kurzschlusserkennung des Boosters zusätzliche Sicherheit. Die Sicherungen können entsprechend der eigenen Modellbahn
angepasst werden. Bei der Bemessung der Sicherungen sind Wagenbeleuchtungen mit zu
berücksichtigen.
Loks lösen die Belegtmeldung sicher aus. Zusätzlich müssen die Radachsen der Wagen mit Widerständen ausgerüstet werden. Werte von 15K- bis
22KOhm haben sich als zuverlässig erwiesen. Alle Trennstellen müssen sich auf der gesamten Modellbahn immer in der gleichen Schiene
befinden. Bei Kehrschleifen ist der Stromfühlerenkoder in der Boosterzuleitung des Trennstellenmoduls zu installieren. Nicht wie unten am
Gleis.
Auch wenn TraincontrollerTM für seine grundsätzliche Funktion keine Belegtmeldung von Weichen benötigt sei diese hier jedoch
empfohlen, weil die Betriebssicherheit dadurch erhöht wird und der Preis vergleichbar niedrig ist. Es ist also wichtig, sich schon bei der
Planung der Modellbahn Gedanken über Trennstellen und Blöcke zu machen. Das Kapitel über Blöcke im Traincontrollerhandbuch gibt
die entsprechenden Antworten. Ansonsten gilt die Regel "lieber ein Rückmelder zuviel als einer zuwenig".
Auf die Pine Spannugsswitch muss ein Jumper aufgesetzt werden. Er bestimmt, ob die Versorgungsspannung separat oder über das XBus-Kabel
das Modul versorgt.
Zum Aufbau gibt es keine Ergänzungen.
Anschlussschema
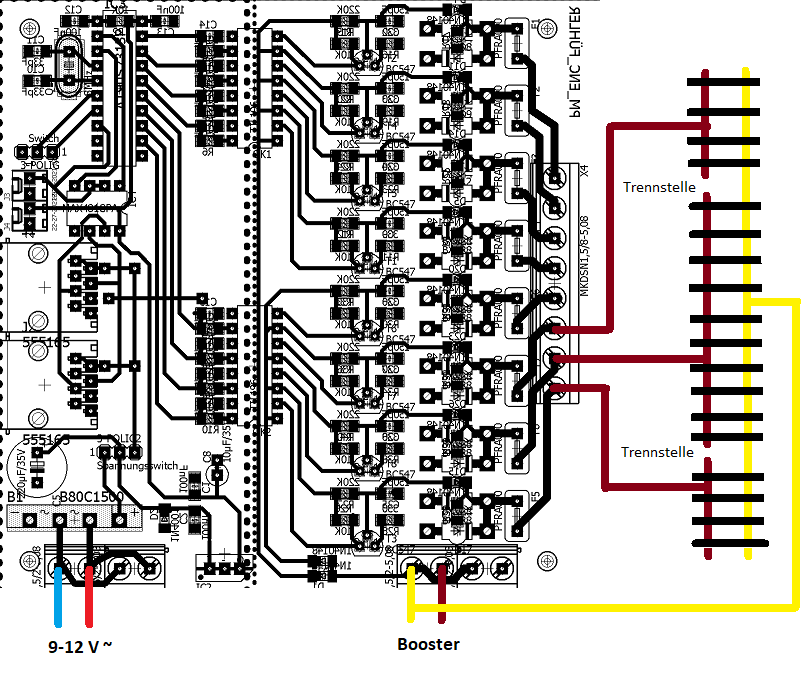
Der Stromfühlerenkoder wird mit dem selben uC Code betrieben wie der 8fach Enkoder.
Download:
Bitte diesem Link folgen.
Stand: 25.11.2019
|